Na podstawie wartości temperatury powietrza oraz jego wilgotności istnieje możliwość wyznaczenia temperatury punktu rosy.
W przykładzie do jej wyznaczenia wykorzystano wskazania Multisensora IR.
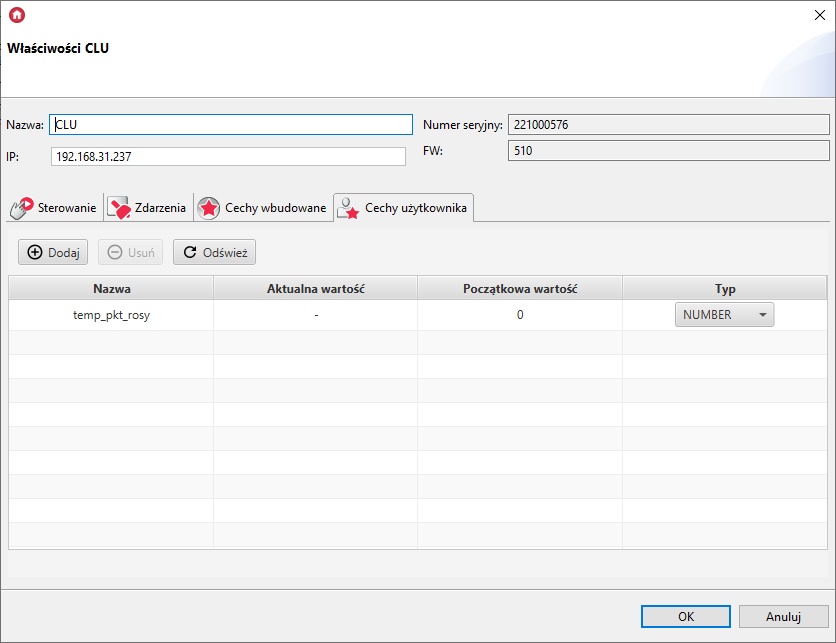
W celu wyznaczenia temperatury punktu rosy należy utworzyć:
- cechę użytkownika typu number w CLU:
- skrypt:
temp = CLU->MS_TEMPERATURE_SENSOR_01->Value
humidity = CLU->MS_HUMIDITY_SENSOR_01->Value
CLU->temp_pkt_rosy=(humidity/100)^0.125*(112+0.9*temp)+0.1*temp-112
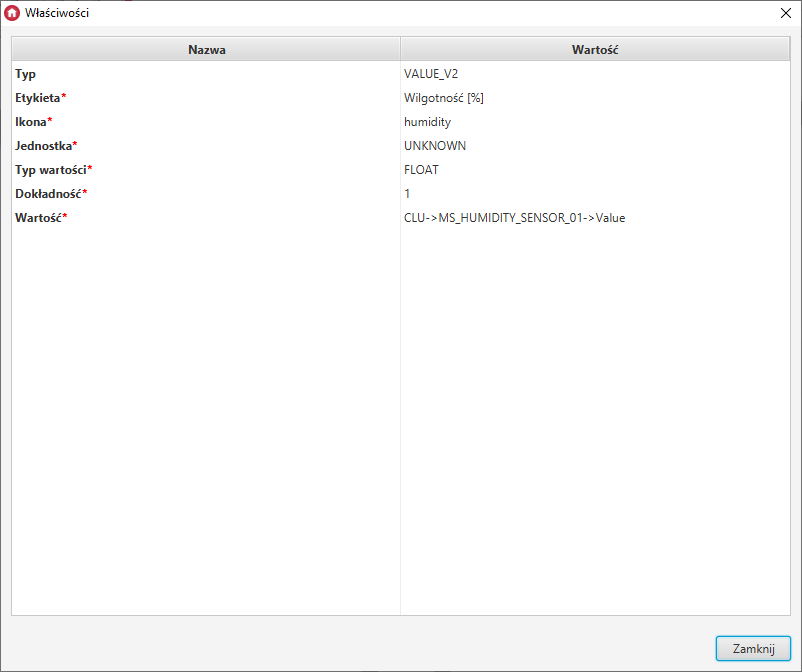
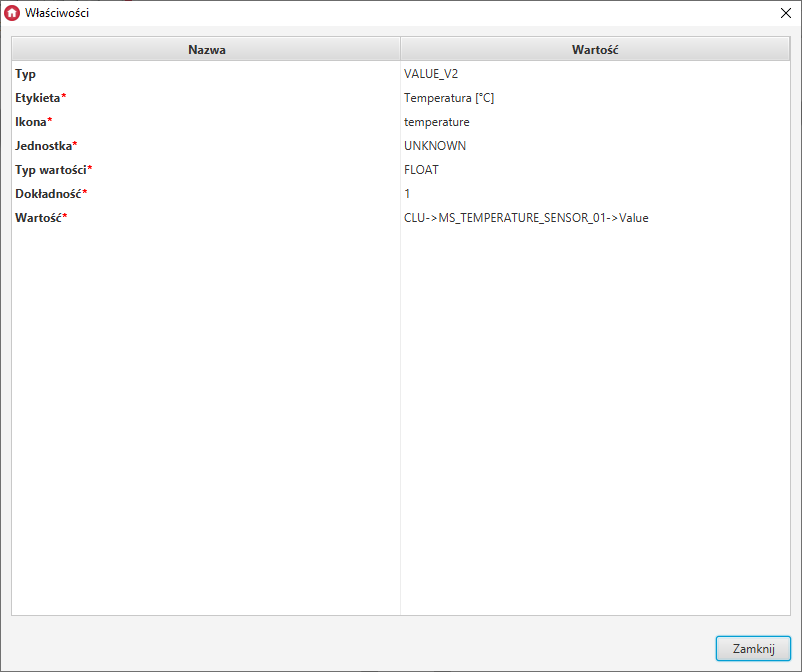
- interfejs zawierający widżety Value_V2 wyświetlające odpowiednie wartości:
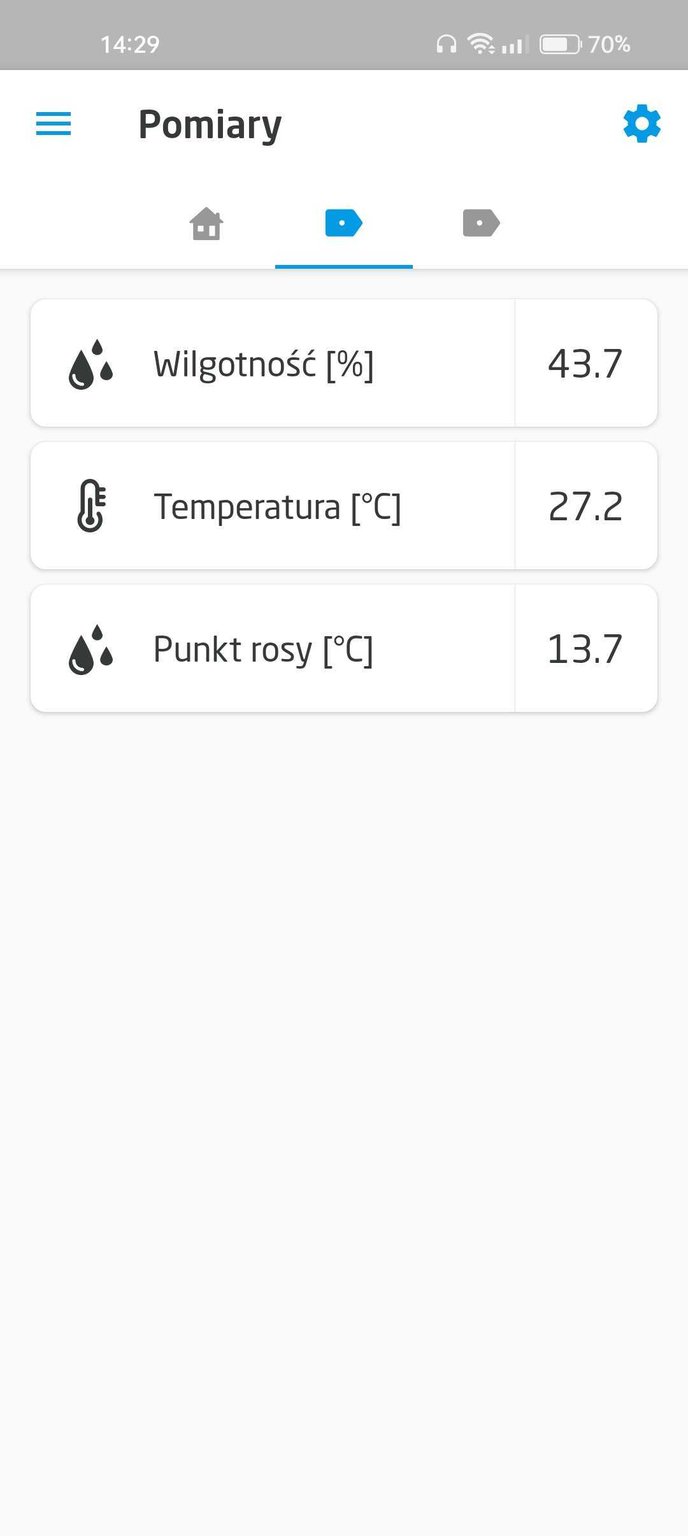
Po przesłaniu konfiguracji do CLU interfejs powinien wyświetlać wartości temperatury powietrza, wilgotności oraz temperatury punktu rosy: